Development of Adaptive Control and Operating Modules for Precision Manipulation
"China's Technology Innovation 2030" - Major Project on Next Generation Artificial Intelligence
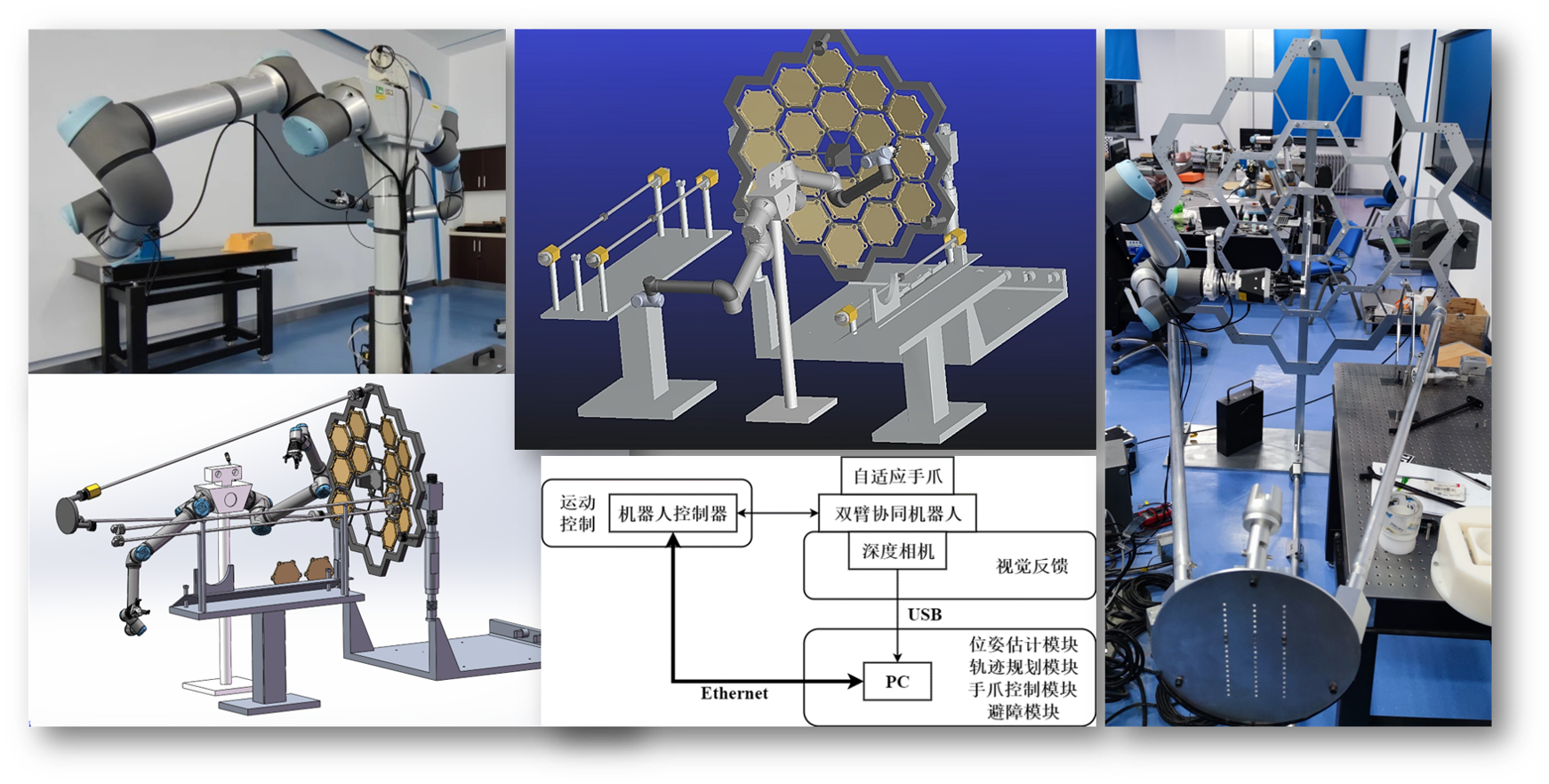
Ground experiment for high precision on-orbit assembly of space telescope using dual-arm robot. Webpage •
PDF •
Code
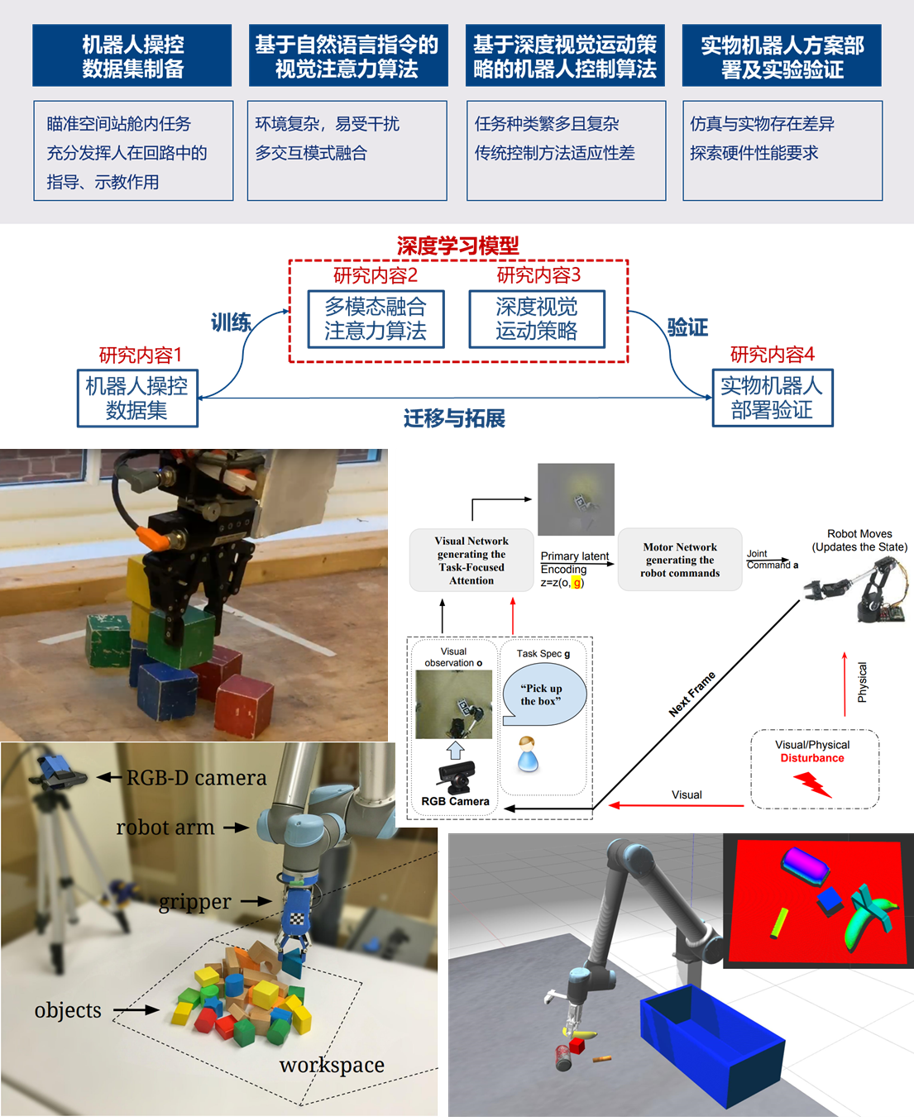
Astronaut-Robot Collaborative Manipulation Based on Machine Learning
Integration of natural language instructions into deep visuomotor policies for multi-step stacking tasks. Webpage •
PDF •
Code
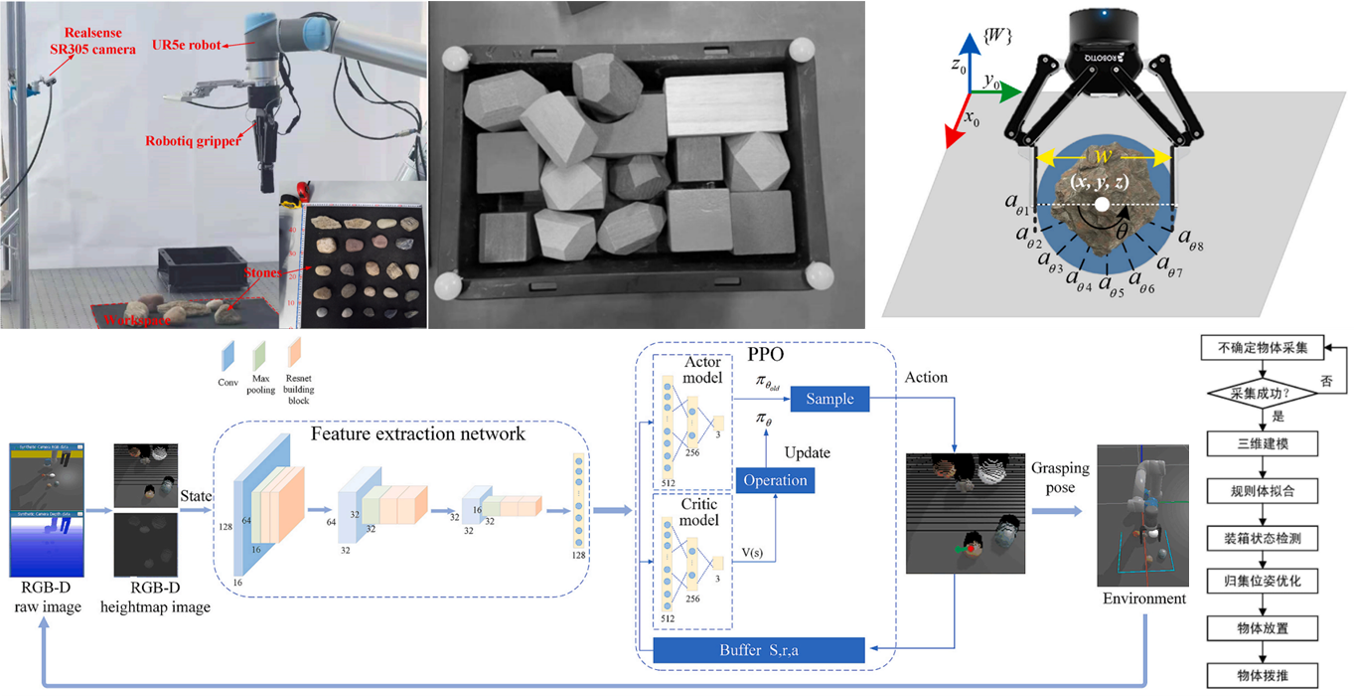
Intelligent Autonomous Exploration System for Celestial Bodies
Method for extraterrestrial sampling and packing based on deep reinforcement learning. Webpage •
PDF •
Code
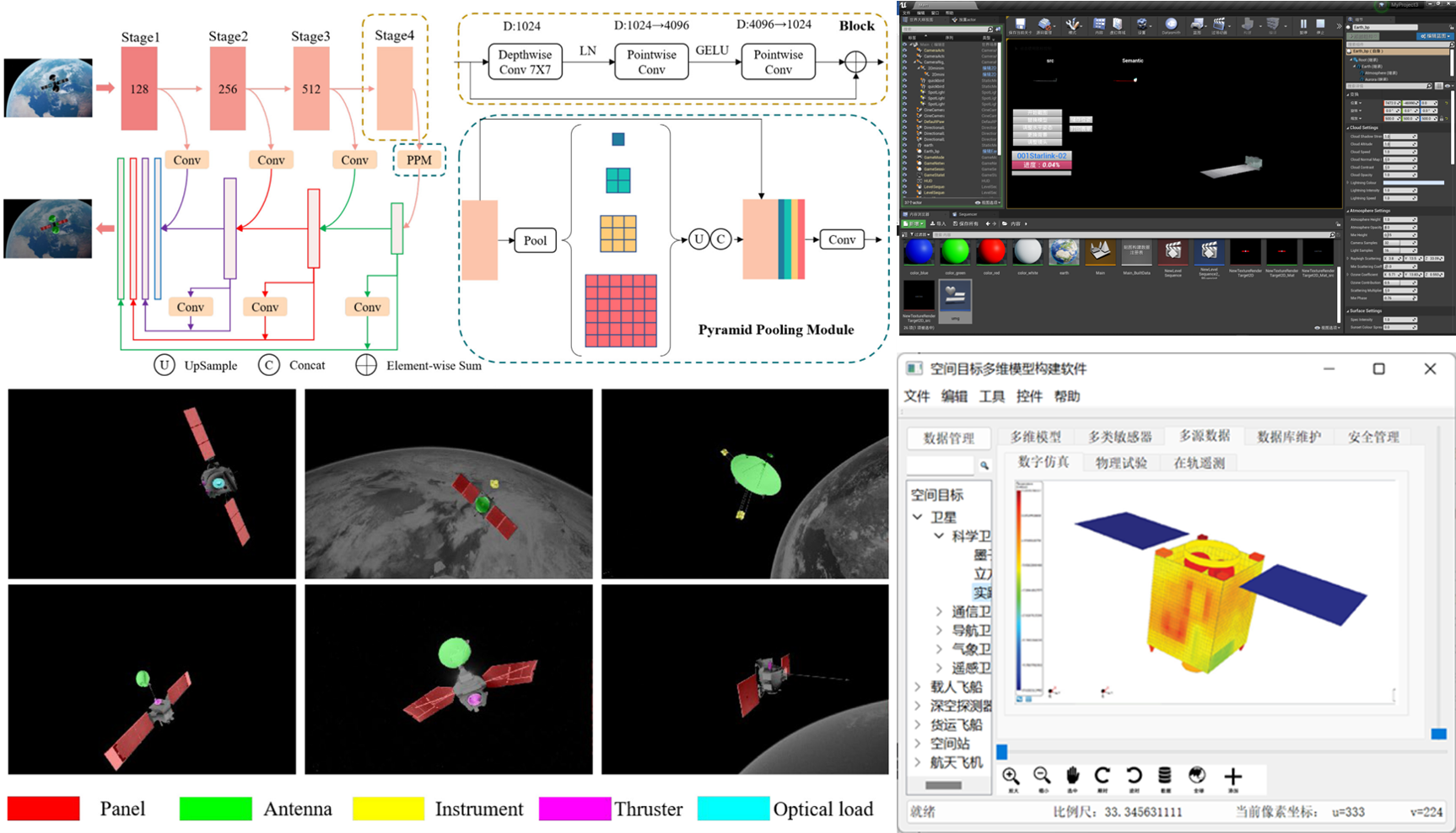
Multidimensional Simulation and Enhancement for Space Objects and Scenes
Database management software for intelligent recognition of spacecraft components. Webpage •
PDF •
Code
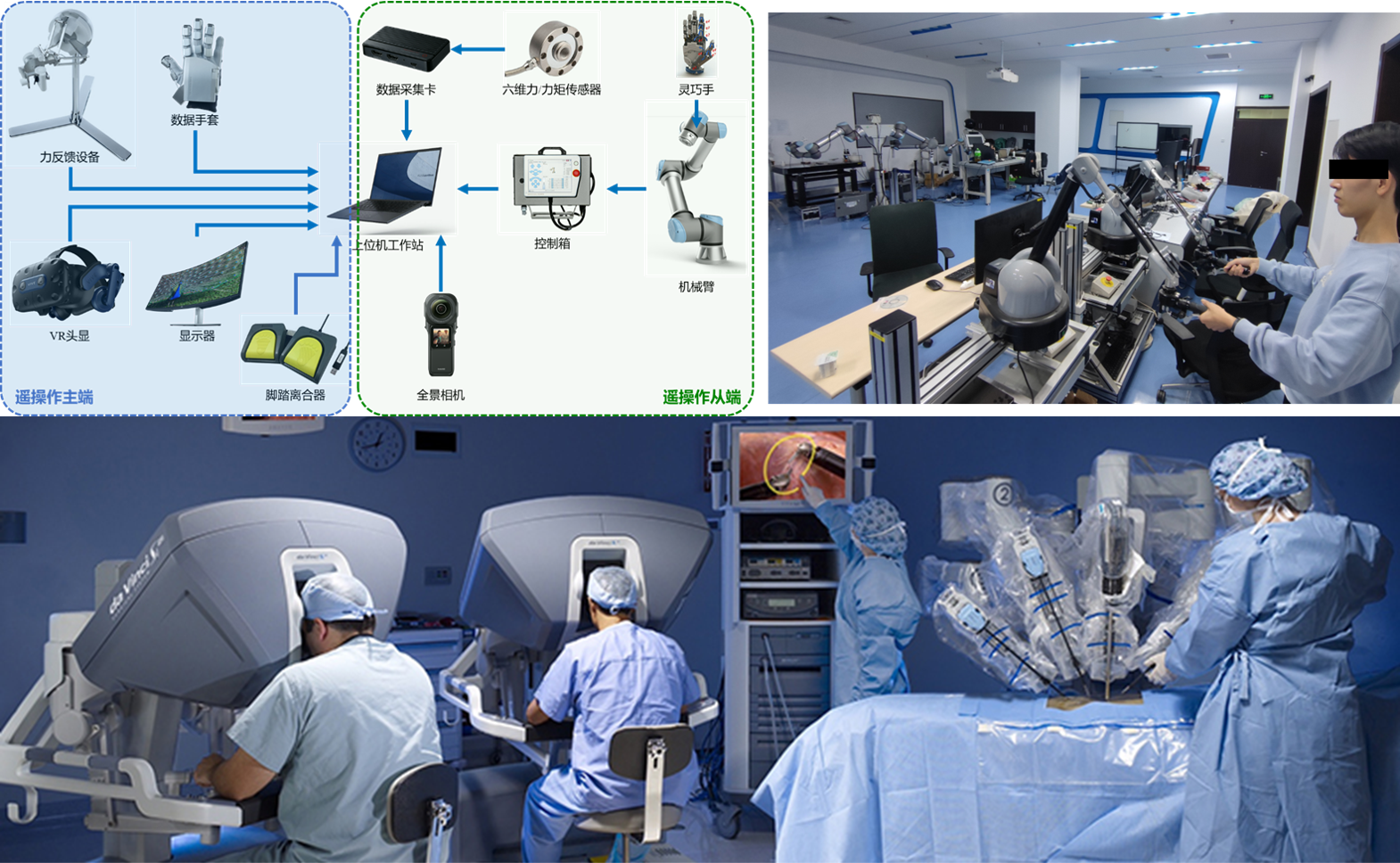
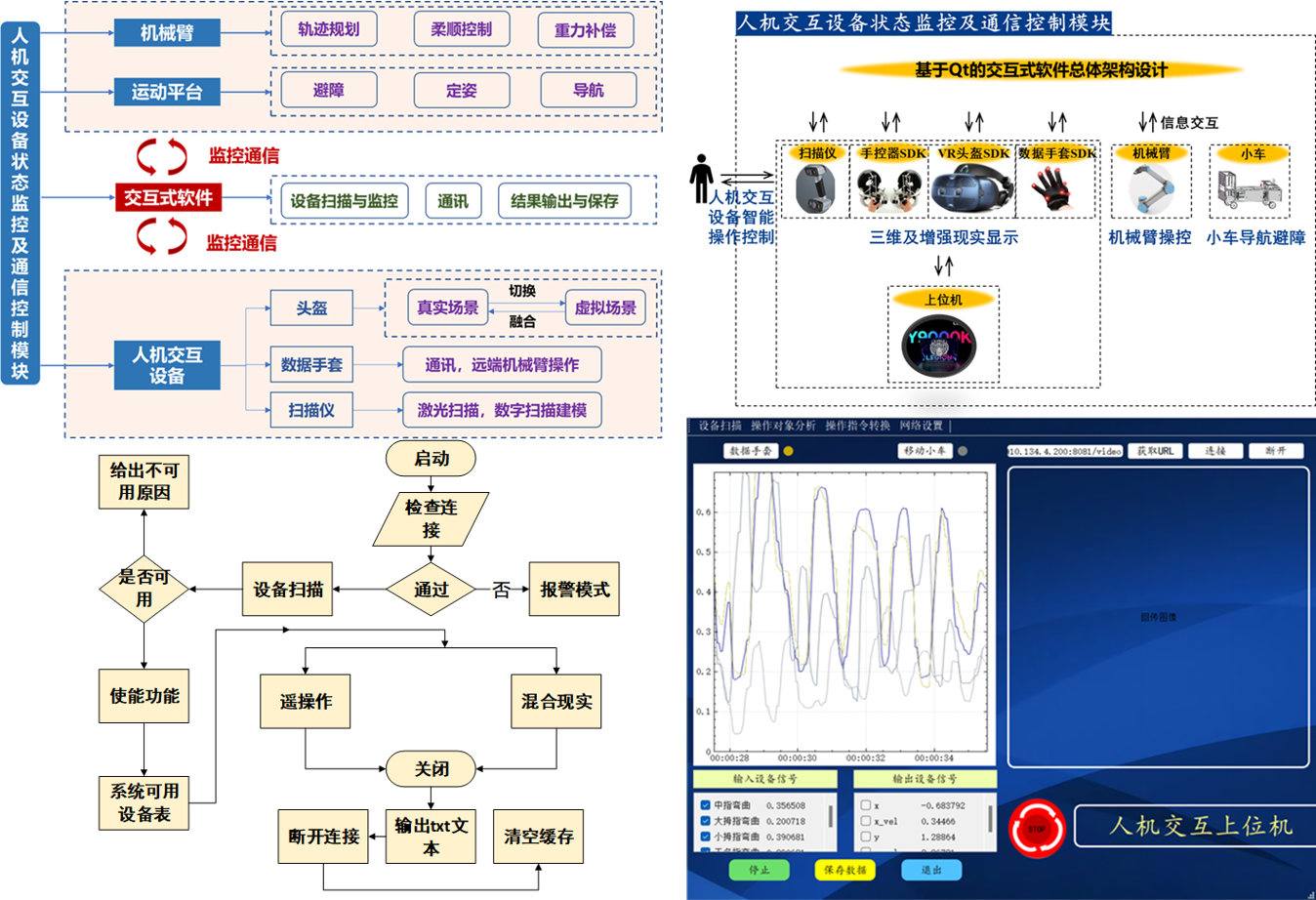
Development of a Tactile Force Feedback Teleoperation Device
Method for teleoperating collaborative robots using force feedback devices. Webpage •
PDF •
Code
Interface Conversion Module for Different Configuration Manipulated Targets
Hardware and algorithm design and deployment of upper-limb exoskeleton robots. Webpage •
PDF •
Code
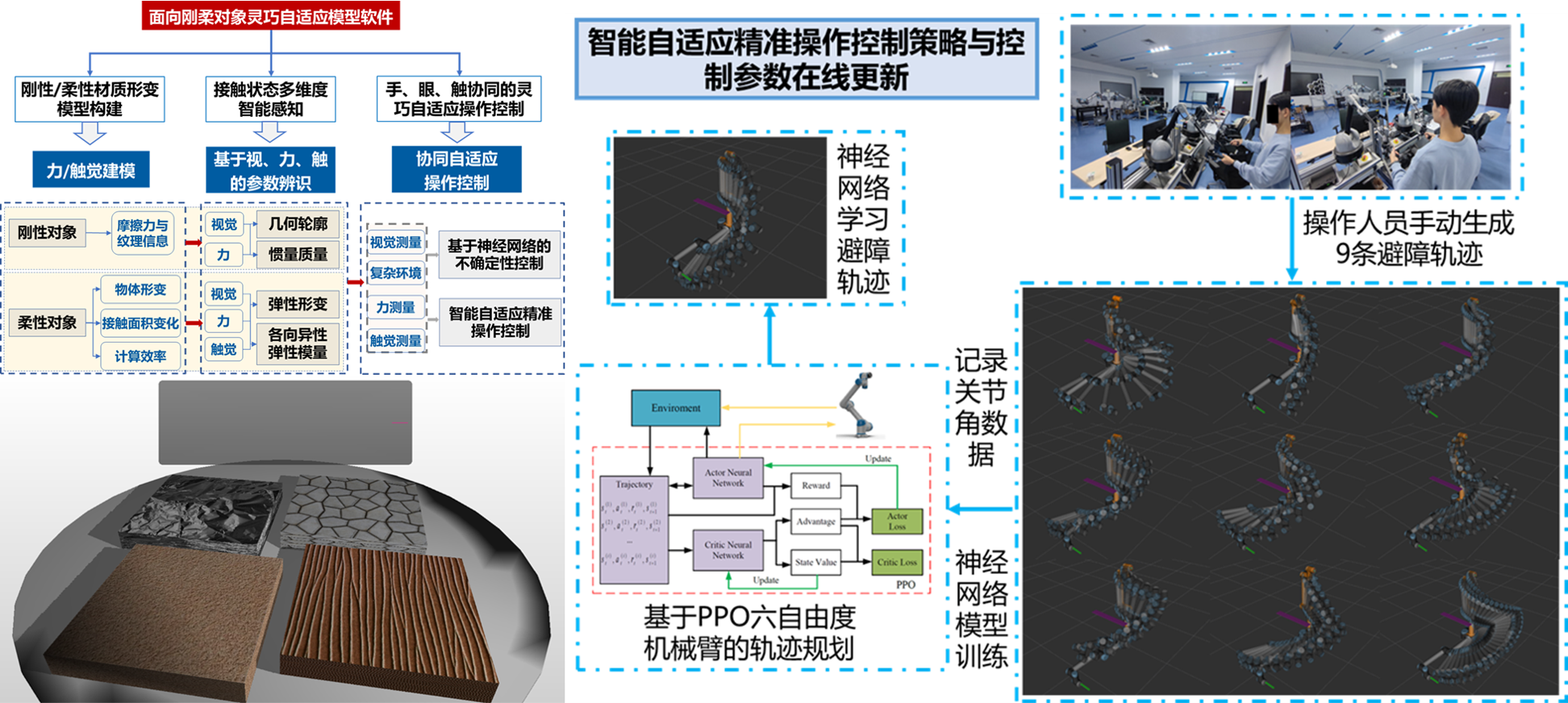
Development and Numerical Verification of Adaptive Contact Modeling Software
Construction, validation and application of visual-haptic models for rigid and flexible material. Webpage •
PDF •
Code
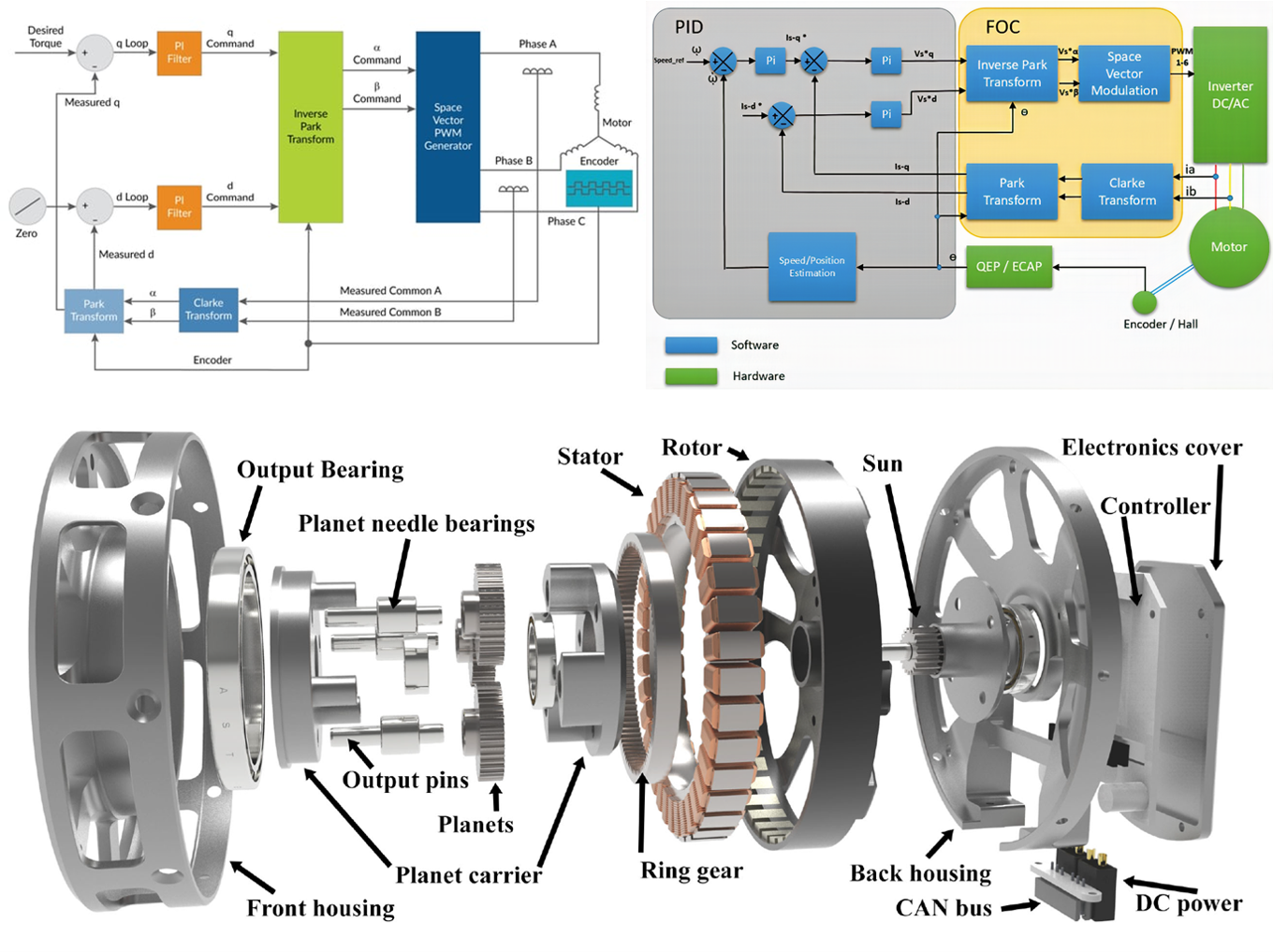
Design and Control of High-Performance Brushless Servo Motors
Design of motor mechanical structure and FOC (field-oriented control) driver. Webpage •
PDF •
Code
Undergraduate Projects
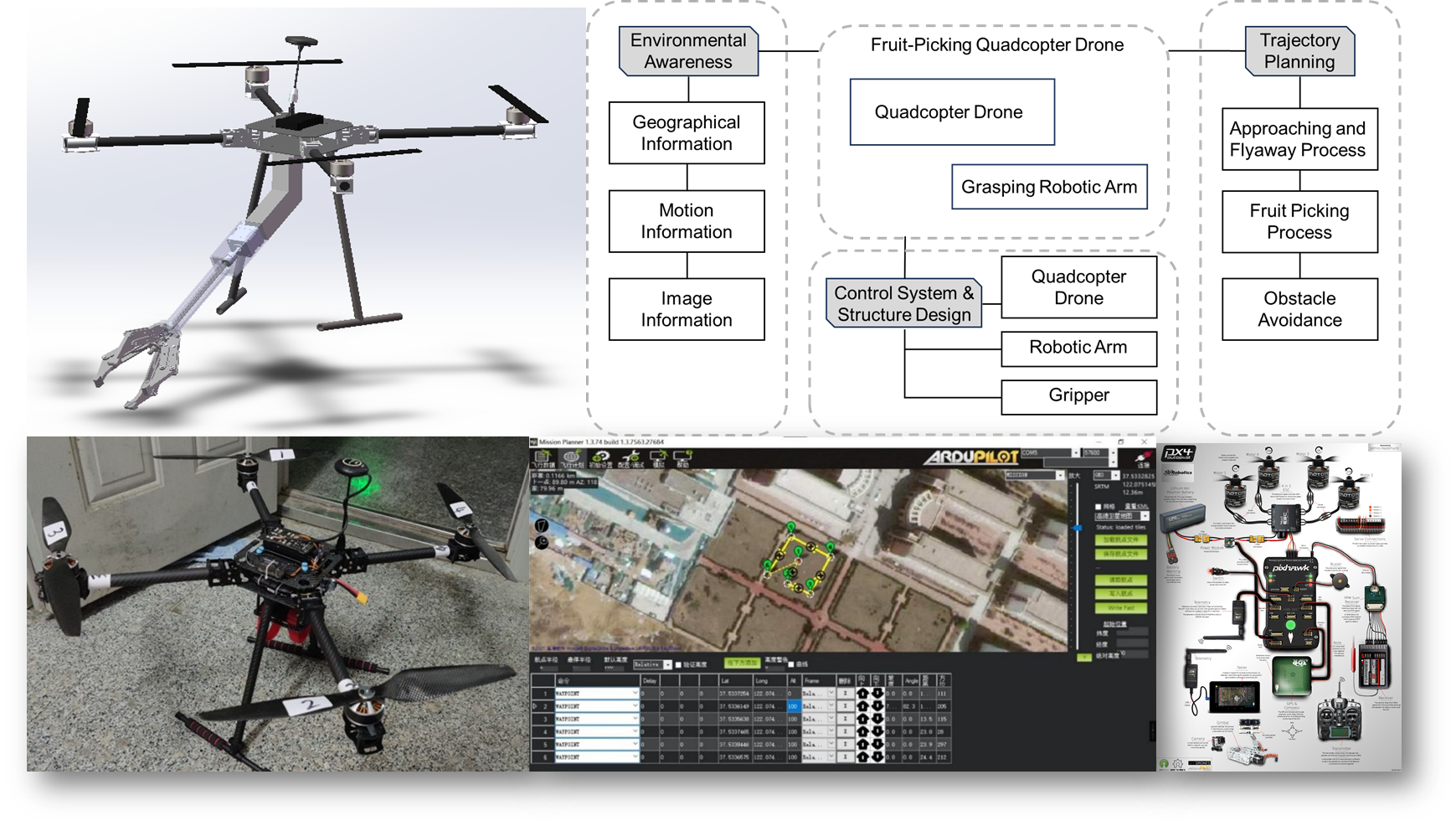
Research on the fruit-picking quadcopter drone based on PX4
Development and experimentation of fruit-picking quadcopter drone prototype. Webpage •
PDF •
Code
Auto-aiming pellet launcher quadcopter
Robomaster National Robotics Competetion, University Championship. Webpage •
PDF •
Code
Human-in-the-loop control of a wheelchair-mounted robotic arm
Laser point-driven object detection and grasping based on RGB-D images. Webpage •
PDF •
Code
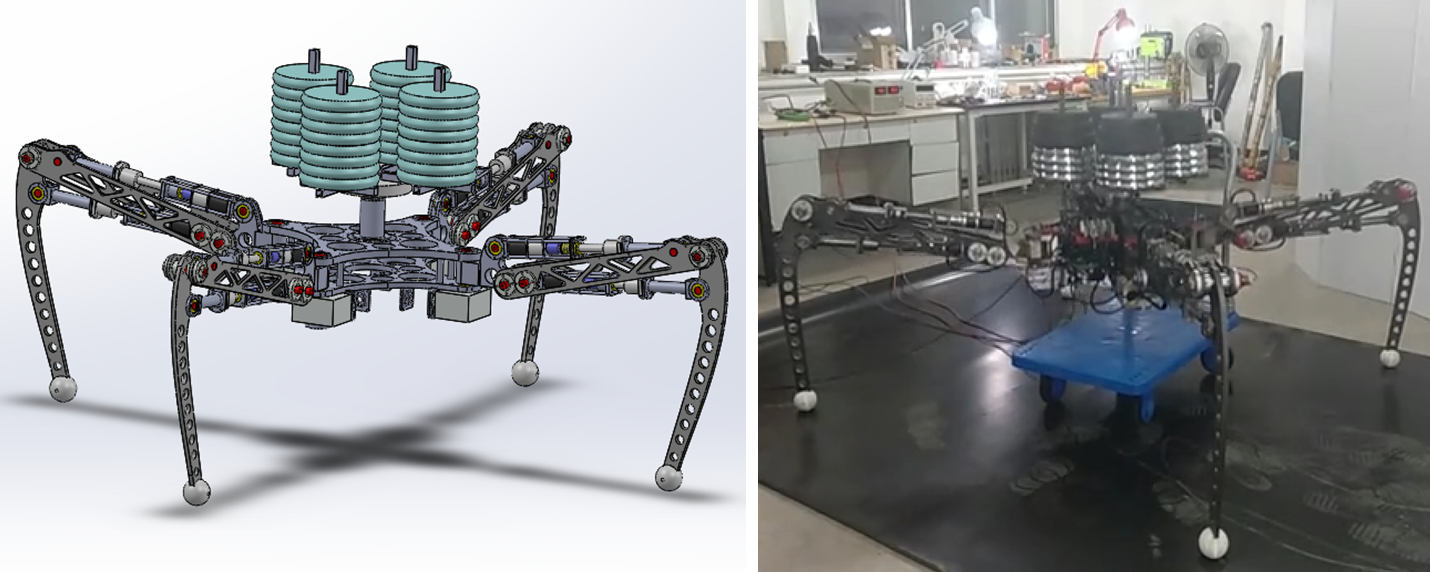
Research on load-bearing quadruped robots
Biomimetic Quadruped Robot Structural Design and Motion Control. Webpage •
PDF •
Code
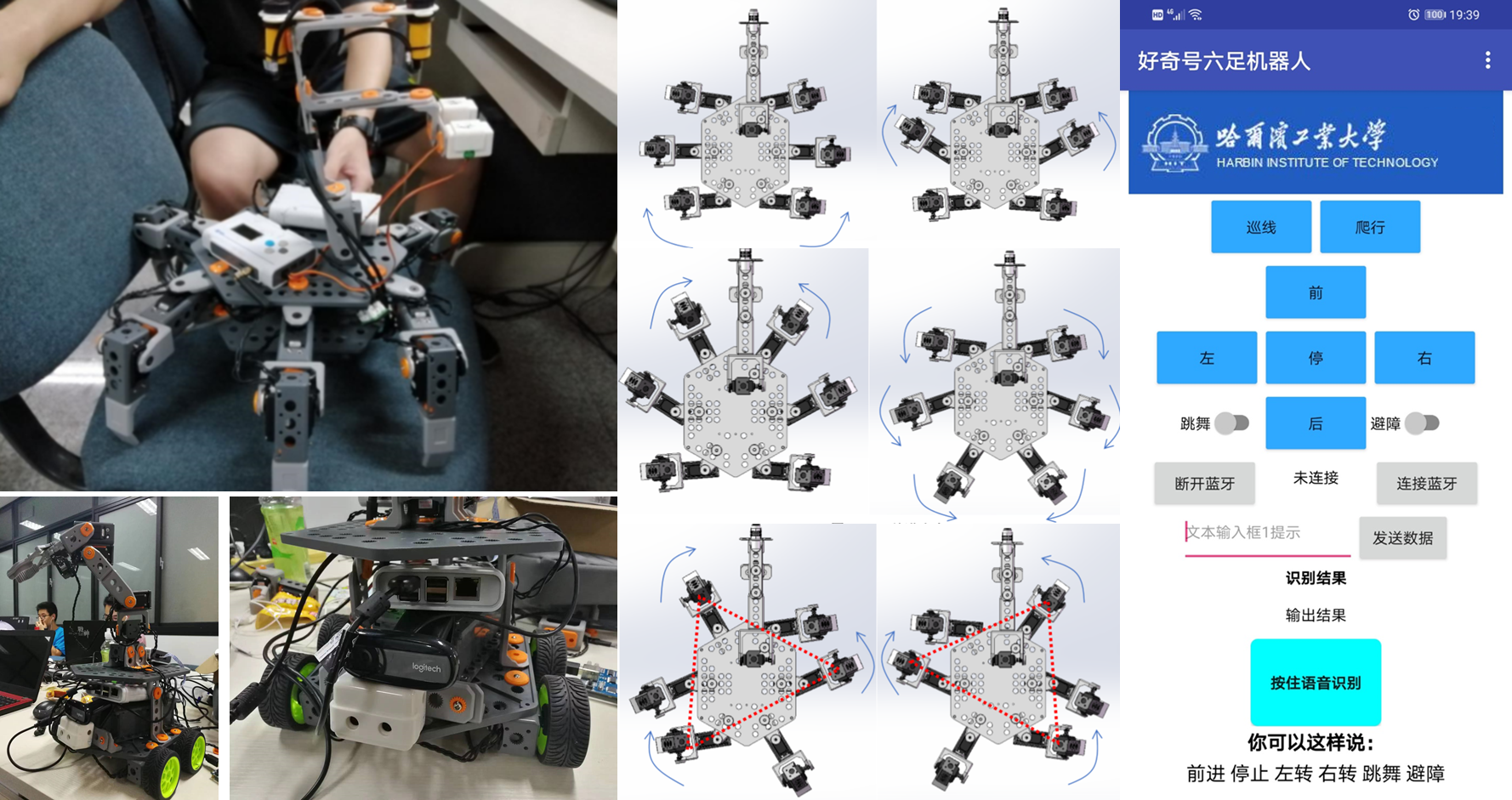
Development of an embedded bionic hexapod robot
A hexapod robot integrating bluetooth interaction, obstacle avoidance, and line follower modules. Webpage •
PDF •
Code
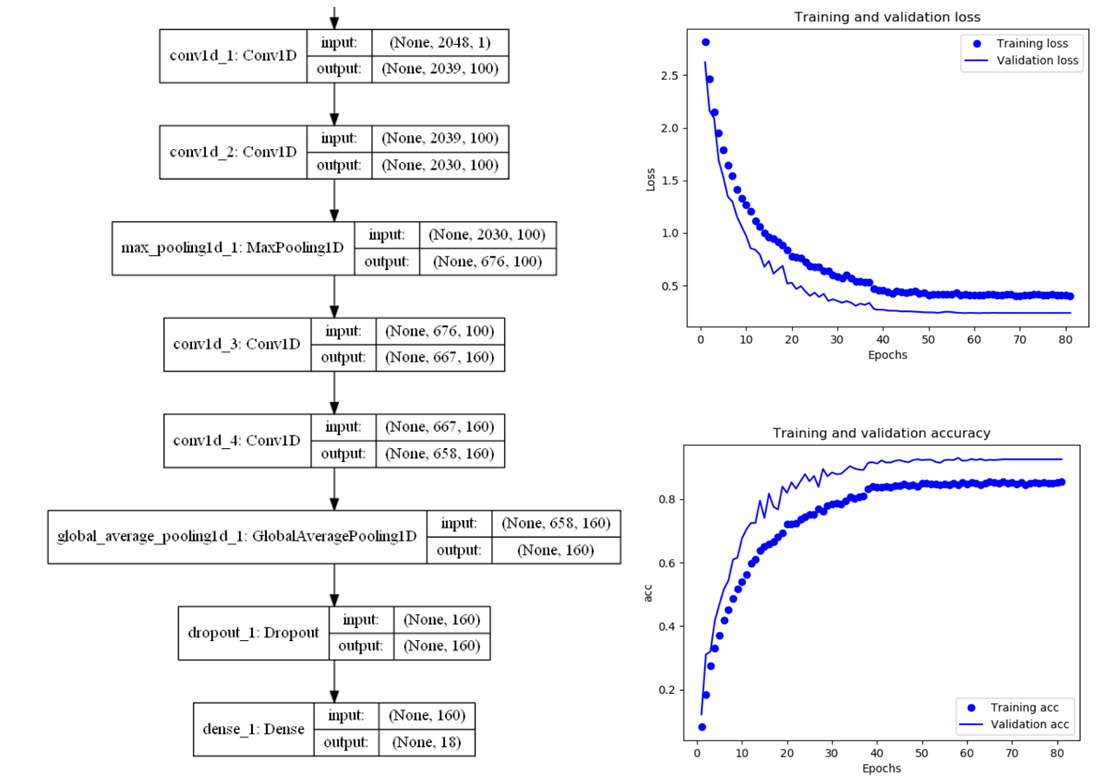
Fault classification based on mechanical vibration signals
Mechanical Failure Classification Based on Pattern Recognition Methods. Webpage •
PDF •
Code
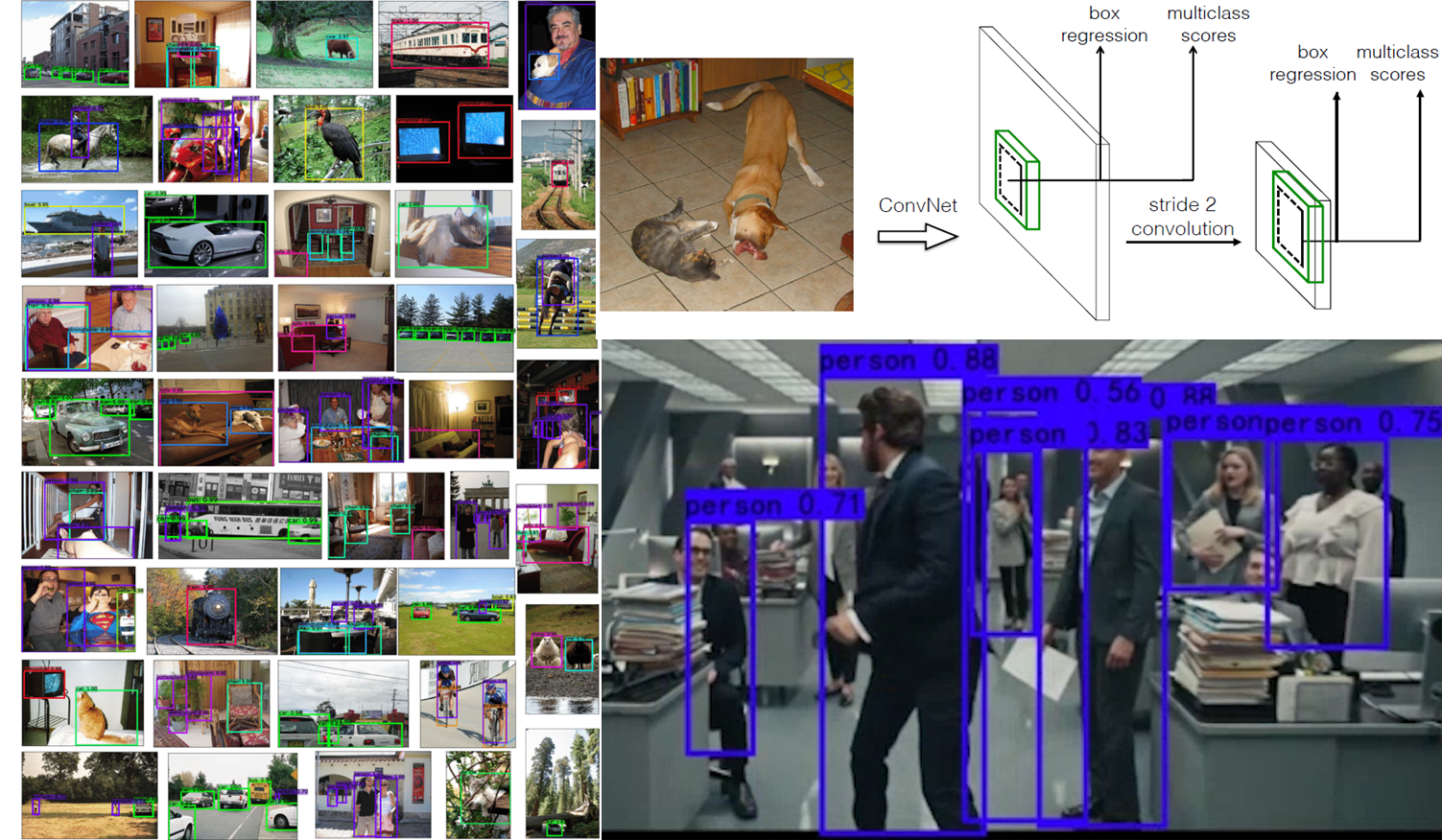
Video object detection based on SSD algorithm
Training of SSD algorithm model based on VOC2007 dataset. Webpage •
PDF •
Code