Research
Research Interests (Coming Soon!)
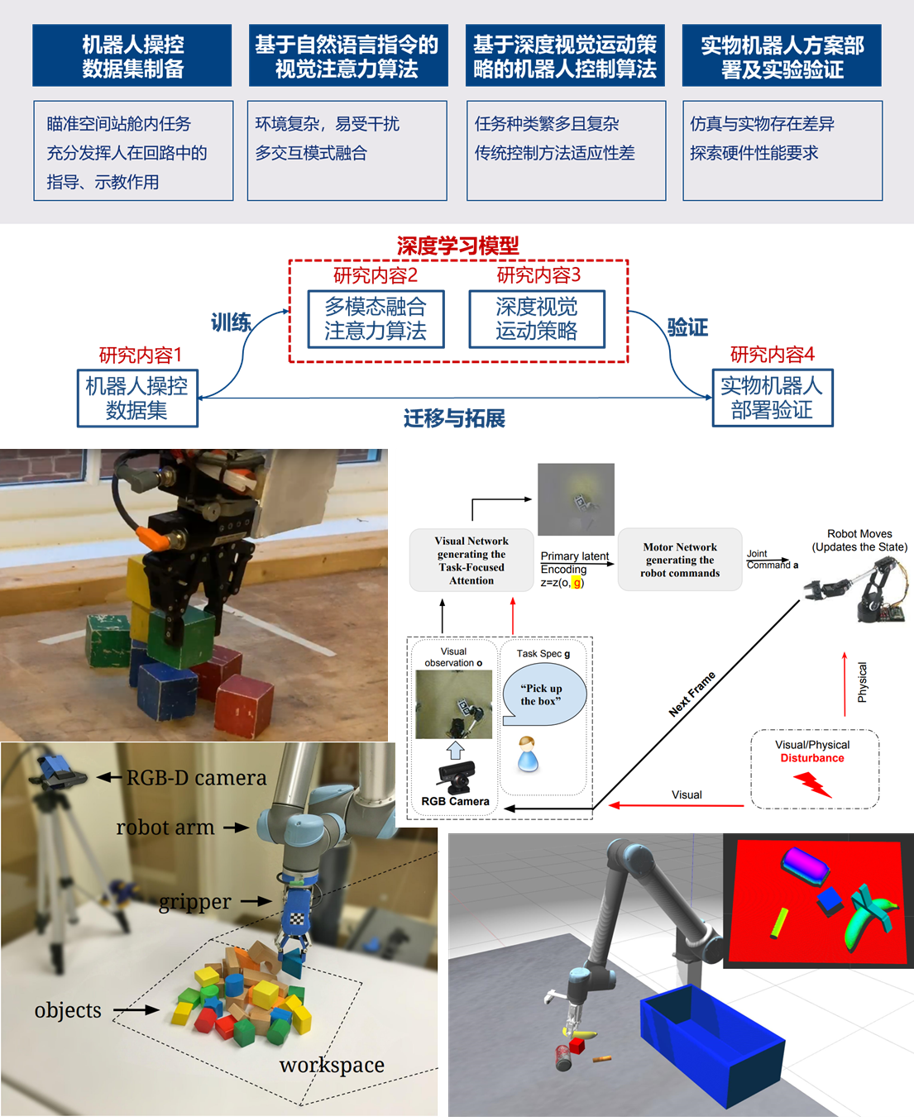
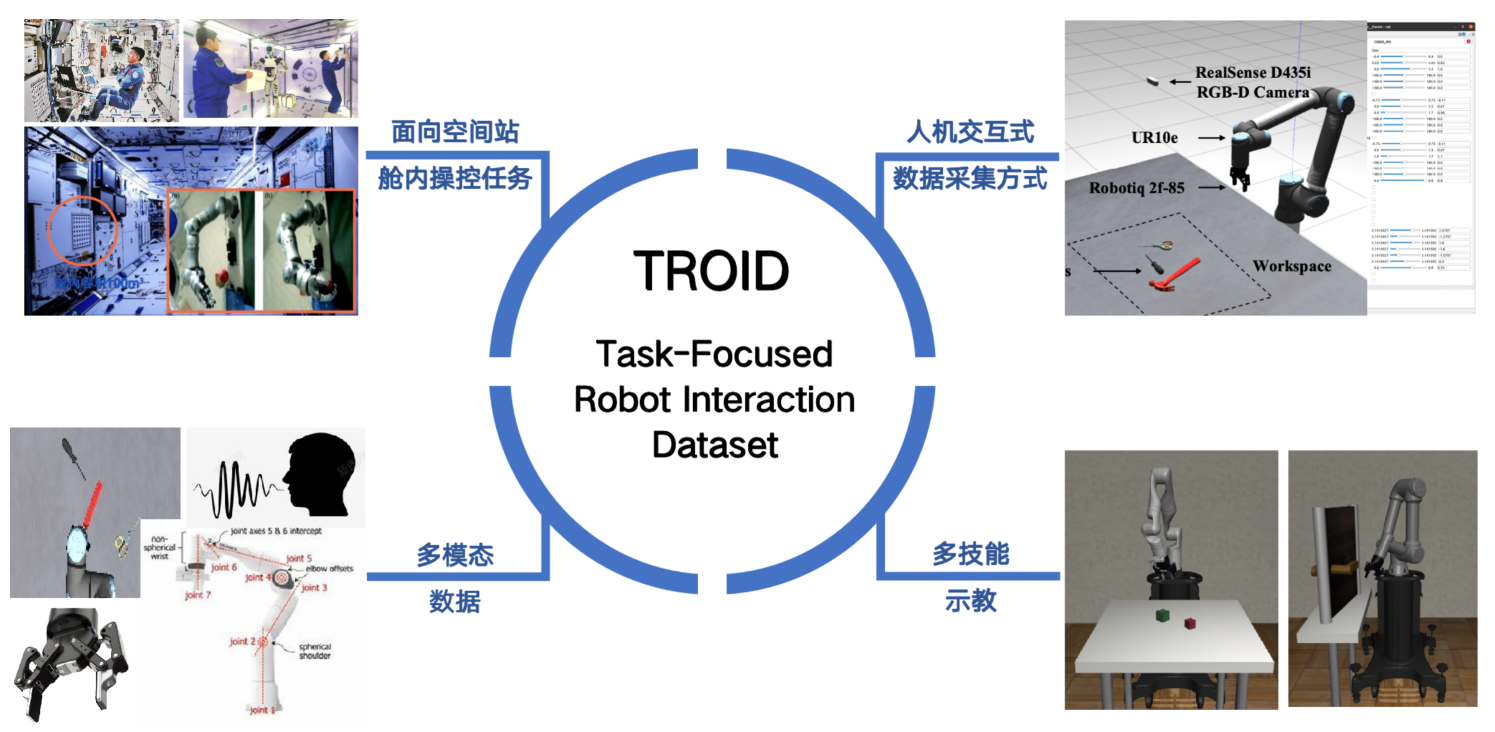
My Research mainly focuses on Robot Learning - to enable machines to intelligently interact with the world, improve themselves over time and acquire novel skills via machine learning. Broadly speaking, I study how AI models empower robots to master novel skills or adapt to their environment(i.e. Reinforcement Learning, Imitation Learning, Meta Learning), how AI models are efficiently deployed to improve perception, decision-making, planning, and control capabilities of robots with human-in-the-loop(i.e. Human-Robot Interaction, Human-Robot Collaboration), how multi-modal information can be represented to enhance the sense of presence for human-robot coexistence(i.e. Multimodal LLM). Additionally, my ambition is to work on something COOL, enhancing intelligence for robots (collaborative robots, quadruped robots, humanoid robots, aerial robots, mobile robots, etc.) in real world.
Revolving these goals, my research interests focus on:
- Robot Learning
- Robotic Perception, Planning, and Control
- Embodied Multimodal Intelligence in Robotics
- Simultaneous Localization and Mapping (SLAM)
- Autonomous Driving
Research Experience